

We spoke to Viki Sandor, Research Engineer at the Austrian Institute of Technology (AIT) and Senior Lecturer at UIBK, who shed light on the projects and how Speckle facilitated collaboration during CoDeC.
Introducing Cognitive Urban Design Computing (CoDeC)
CoDeC was a five-year research project initially led by Reinhard König and later by Angelos Chronis at the AIT (2018-2023). The goal was to find new ways to integrate Artificial Intelligence (AI) and computer-aided methods with urban planning and architecture practice.
As part of the project, the City Intelligence Lab (CIL) was founded, among other things. Over the years, a broad network has developed between AIT, Bauhaus University Weimar, the University of Stuttgart, Future Cities Laboratory Singapore, ETH Zurich, IAAC Uni, and REHUB FORGE.
The Conference
The idea of the CoDeC conference was to bring together the network, current and former employees, to exchange not only the CoDeC results but also the recent research of alumni. The CoDeC Hackathon was a collaborative effort between AIT (City Intelligence Lab) and REHUB FORGE. The Conference brought together experts from AIT, GmgH, the Institute for Advanced Architecture of Catalonia, and many more.
The Hackathon
The CoDeC Hackathon brought together a rich network to exchange ideas. It involved five people from REHUB FORGE and respective representatives from the University of Stuttgart and AIT/CIL. The goal was to try out new tools and methods or adapt existing tools (Socrates) to fit the format of a live tech demo for data-driven real-time design processes.
In terms of content, the Hackathon participants wanted to expand the existing CIL live demo, which mainly operates at the urban level (interactive traffic simulations, accessibility analyses, real-time microclimate calculations), to be able to carry out parametric urban planning in detail at the neighborhood and building level.
The following aspects were implemented in detail:
- Socrates (generation of building volumes, taking regulations into account) version for interactive real-time design
- the live coupling of Socrates with other Grasshopper scripts, analyses, and simulations, including Virtual Reality (VR) projection in architectural models and real-time rendering
- the live coupling of all programs with the Omniverse RT rendering engine to integrate shadows, light, and spatial effects into the design process
- a script to generate detailed facades for Socrates buildings
- a script to design and visualise detailed street cross-sections in 3D
- collecting and querying data (design variants, simulation results) in a knowledge graph database.
By leveraging Artificial Intelligence (AI) and Machine Learning (ML), methods developed have already been used in research projects for simulations of mobility, energy, and climate issues in urban planning. The CIL represented an international AI-supported showcase lab as part of this project.
::: tip
In a nutshell, CoDeC shed light on computer-aided methods for urban planning and architecture, as well as the latest developments in the field of Knowledge Information (KI).
:::
Achieving Real-Time Collaboration With Speckle
Researchers collaborated online and offline to develop an interactive workflow that integrated urban design and analysis tools. Viki told us about a specific workflow incorporating street profile design and real-time rendering using Omniverse and Speckle. This resulted in a real-time street visualisation method, offering a comprehensive street view during urban sketching.
The Hackathon team worked with different software to curate feedback from one system to another.
“Different software solutions in the real-time collaborative environment make the design process so much more interesting” (Pol Foreman, REHUB FORGE).
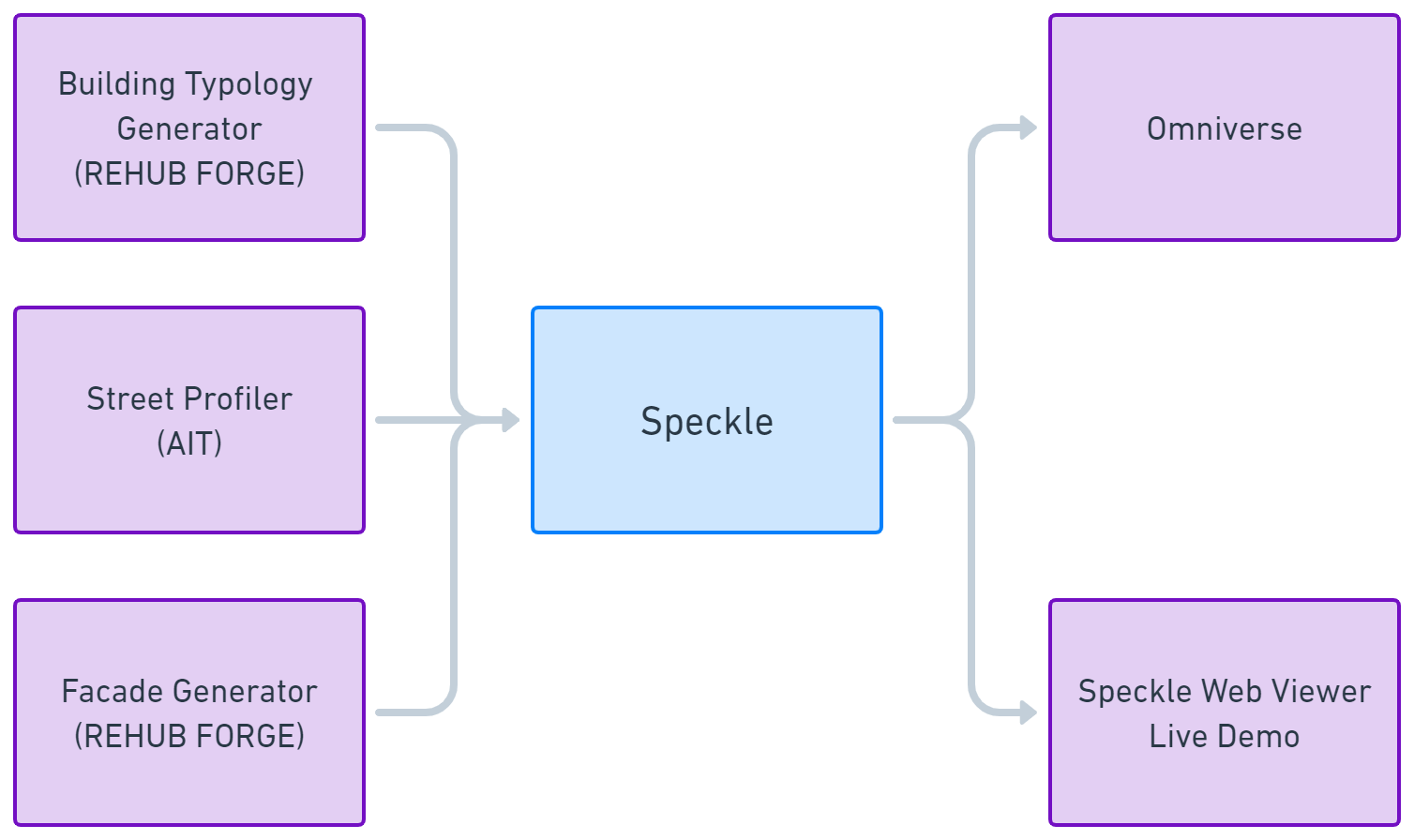
Speckle enabled the real-time planning workflow to facilitate communication between two active laptops. The first laptop was responsible for generating Rhino-Grasshopper geometry, using various tools such as the parametric building typology generator (REHUB FORGE), street profiler (AIT), and facade generator (REHUB FORGE).
The results were previewed within the Rhino environment. Meanwhile, the second laptop acted as the Speckle receiver, sending the generated results to Omniverse for real-time visualisation purposes. All CoDeC projects were presented at the end of the conference during a live demo enabled by Speckle.
Final Thoughts
At Speckle, we stand for delivering value with 3D data to an audience that is as diverse as possible. We’re stoked to see how Viki and her team pushed the boundaries of what’s possible and integrated Speckle into the cutting-edge process and tools built at AIT.
We want to enable everyone to work and collaborate remotely efficiently throughout the development and design iteration process of urban environments.
How will you design your next master plan?
Thank you to Iuliia Osintseva, Egor Gavrilov, Pol Foreman, Andrej Sluka, Diellza Elshani, Viktoria Sandor, and Serjoscha Düring.